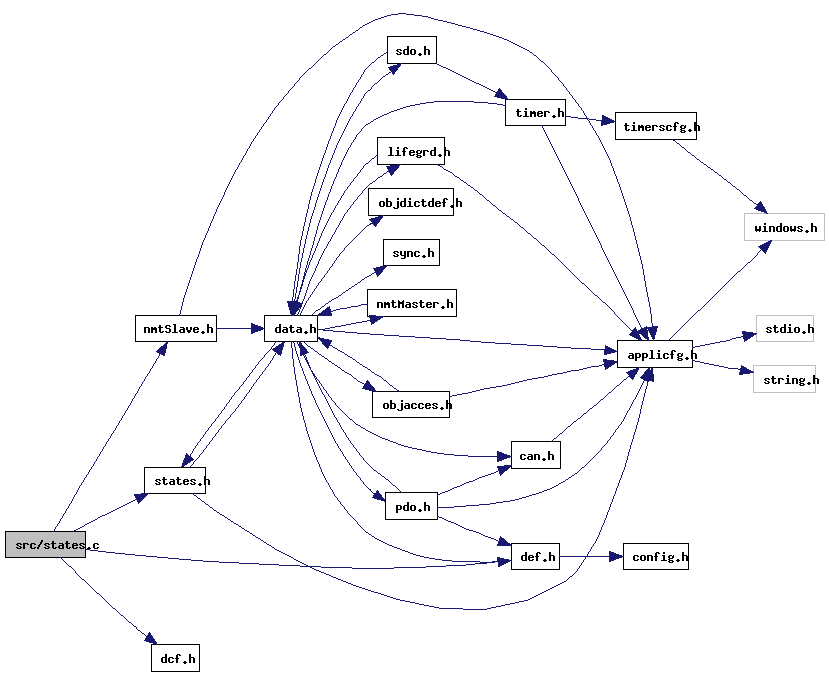
#include "states.h"#include "def.h"#include "dcf.h"#include "nmtSlave.h"Include dependency graph for states.c:
Go to the source code of this file.
Defines | |
| #define | StartOrStop(CommType, FuncStart, FuncStop) |
| #define | None |
Functions | |
| void | switchCommunicationState (CO_Data *d, s_state_communication *newCommunicationState) |
| e_nodeState | getState (CO_Data *d) |
| void | canDispatch (CO_Data *d, Message *m) |
| UNS8 | setState (CO_Data *d, e_nodeState newState) |
| UNS8 | getNodeId (CO_Data *d) |
| void | setNodeId (CO_Data *d, UNS8 nodeId) |
| void | _initialisation () |
| void | _preOperational () |
| void | _operational () |
| void | _stopped () |
Definition in file states.c.
| #define None |
| #define StartOrStop | ( | CommType, | |||
| FuncStart, | |||||
| FuncStop | ) |
Value:
if(newCommunicationState->CommType && !d->CurrentCommunicationState.CommType){\ MSG_WAR(0x9999,#FuncStart, 9999);\ d->CurrentCommunicationState.CommType = 1;\ FuncStart;\ }else if(!newCommunicationState->CommType && d->CurrentCommunicationState.CommType){\ MSG_WAR(0x9999,#FuncStop, 9999);\ d->CurrentCommunicationState.CommType = 0;\ FuncStop;\ }
Definition at line 102 of file states.c.
Referenced by switchCommunicationState().
| d | ||
| m |
Definition at line 65 of file states.c.
References Message::cob_id, s_state_communication::csHeartbeat, s_state_communication::csPDO, s_state_communication::csSDO, s_state_communication::csSYNC, struct_CO_Data::CurrentCommunicationState, struct_s_timer_entry::d, struct_CO_Data::iam_a_slave, NMT, NODE_GUARD, PDO1rx, PDO1tx, PDO2rx, PDO2tx, PDO3rx, PDO3tx, PDO4rx, PDO4tx, proceedNMTstateChange(), proceedNODE_GUARD(), proceedPDO(), proceedSDO(), proceedSYNC(), SDOrx, SDOtx, SYNC, and SHORT_CAN::w.
Referenced by canReceiveLoop(), and main().
Here is the call graph for this function:

| UNS8 getNodeId | ( | CO_Data * | d | ) |
| d |
Definition at line 224 of file states.c.
References struct_CO_Data::bDeviceNodeId, and struct_s_timer_entry::d.
Referenced by initSensor().
| e_nodeState getState | ( | CO_Data * | d | ) |
| d |
Definition at line 54 of file states.c.
References struct_s_timer_entry::d, and struct_CO_Data::nodeState.
| void setNodeId | ( | CO_Data * | d, | |
| UNS8 | nodeId | |||
| ) |
| d | ||
| nodeId |
Definition at line 235 of file states.c.
References struct_CO_Data::bDeviceNodeId, struct_s_timer_entry::d, struct_CO_Data::firstIndex, struct_CO_Data::lastIndex, struct_CO_Data::objdict, s_quick_index::PDO_RCV, s_quick_index::PDO_TRS, td_subindex::pObject, td_indextable::pSubindex, s_quick_index::SDO_SVR, UNS16, UNS32, and UNS8.
Referenced by InitNodes(), initSensor(), and main().
| UNS8 setState | ( | CO_Data * | d, | |
| e_nodeState | newState | |||
| ) |
| d | ||
| newState |
Definition at line 138 of file states.c.
References struct_s_timer_entry::d, decompo_dcf(), struct_CO_Data::iam_a_slave, Initialisation, struct_CO_Data::initialisation, struct_CO_Data::nodeState, OD_SUCCESSFUL, Operational, struct_CO_Data::operational, Pre_operational, struct_CO_Data::preOperational, ptrTable, struct_CO_Data::scanIndexOD, Stopped, struct_CO_Data::stopped, switchCommunicationState(), UNS16, and UNS32.
Referenced by InitNodes(), main(), and proceedNMTstateChange().
Here is the call graph for this function:
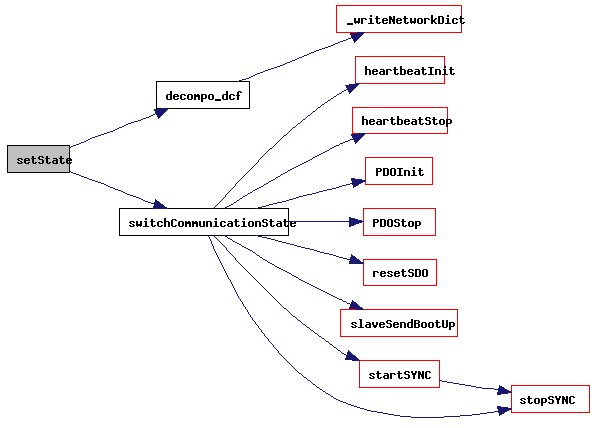
| void switchCommunicationState | ( | CO_Data * | d, | |
| s_state_communication * | newCommunicationState | |||
| ) |
| d | ||
| newCommunicationState |
Definition at line 120 of file states.c.
References struct_s_timer_entry::d, heartbeatInit(), heartbeatStop(), None, PDOInit(), PDOStop(), resetSDO(), slaveSendBootUp(), StartOrStop, startSYNC(), and stopSYNC().
Referenced by setState().
Here is the call graph for this function:

 1.5.1
1.5.1