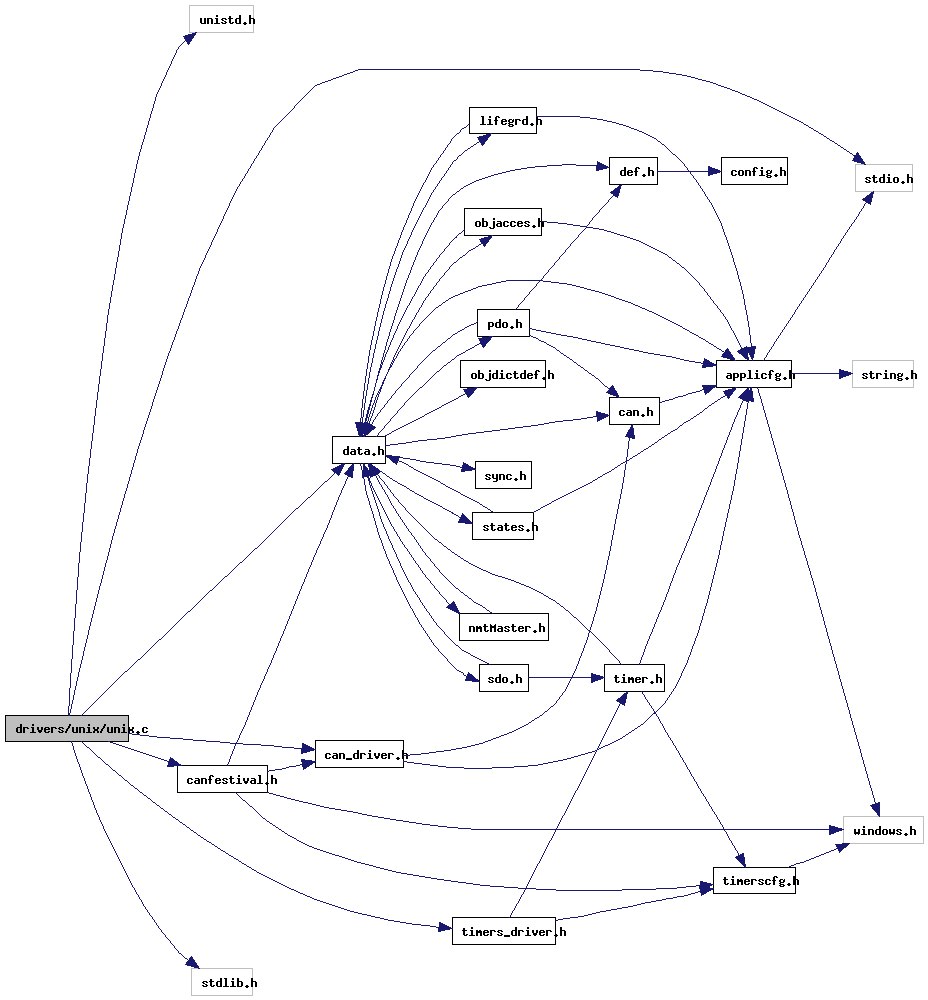
#include <unistd.h>#include <stdio.h>#include <stdlib.h>#include "data.h"#include "canfestival.h"#include "timers_driver.h"#include "can_driver.h"Include dependency graph for unix.c:
Go to the source code of this file.
Data Structures | |
| struct | CANPort |
Defines | |
| #define | DLL_CALL(funcname) (* funcname##_driver) |
| #define | FCT_PTR_INIT =NULL |
| #define | DLSYM(name) |
| #define | MAX_NB_CAN_PORTS 16 |
Functions | |
| UNS8 | UnLoadCanDriver (LIB_HANDLE handle) |
| LIB_HANDLE | LoadCanDriver (char *driver_name) |
| UNS8 | canSend (CAN_PORT port, Message *m) |
| void | canReceiveLoop (CAN_PORT port) |
| CAN_PORT | canOpen (s_BOARD *board, CO_Data *d) |
| int | canClose (CO_Data *d) |
Variables | |
| CANPort | canports [MAX_NB_CAN_PORTS] = {{0,},{0,},{0,},{0,},{0,},{0,},{0,},{0,},{0,},{0,},{0,},{0,},{0,},{0,},{0,},{0,}} |
| #define DLL_CALL | ( | funcname | ) | (* funcname##_driver) |
Definition at line 27 of file unix.c.
Referenced by canClose(), canOpen(), canReceiveLoop(), and canSend().
| #define DLSYM | ( | name | ) |
Value:
*(void **) (&name##_driver) = dlsym(handle, #name"_driver");\ if ((error = dlerror()) != NULL) {\ fprintf (stderr, "%s\n", error);\ UnLoadCanDriver(handle);\ return NULL;\ }
Definition at line 30 of file unix.c.
Referenced by LoadCanDriver().
| int canClose | ( | CO_Data * | d | ) |
| void canReceiveLoop | ( | CAN_PORT | port | ) |
Definition at line 132 of file unix.c.
References canDispatch(), canReceive(), DLL_CALL, EnterMutex(), and LeaveMutex().
Referenced by canOpen().
Here is the call graph for this function:

| LIB_HANDLE LoadCanDriver | ( | char * | driver_name | ) |
| UNS8 UnLoadCanDriver | ( | LIB_HANDLE | handle | ) |
 1.5.1
1.5.1